| ROS学习(23)action通信机制 | 您所在的位置:网站首页 › action links是什么 › ROS学习(23)action通信机制 |
ROS学习(23)action通信机制
ROS学习(23)action通信机制
 敲代码的雪糕
分类:ROS
发布时间 2023.03.26阅读数 34 评论数 0
文章目录
前言
敲代码的雪糕
分类:ROS
发布时间 2023.03.26阅读数 34 评论数 0
文章目录
前言
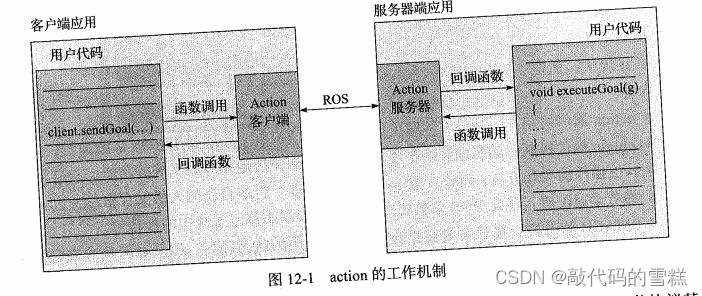
ROS中常用的通信机制是话题和服务,但是很多场景下,这两种通信机制往往满足不了所有需求。 action通信机制,是一种带有连续反馈的上层通信机制,底层基于ROS话题通信。 一、什么是actionROS中的actionlib功能包,用于实现action的通信机制。action类似于服务通信机制,不同之处在于action带有连续反馈,可以不断的反馈任务进度,也可以在任务过程中中止运行。 二、action的工作机制action采用客户端/服务器的工作模式,如下:
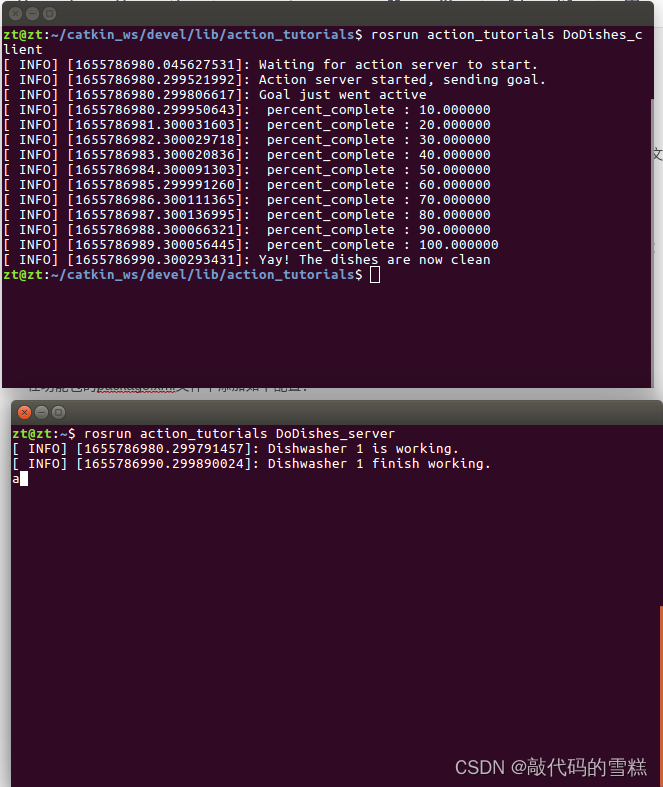
action通过.action文件定义,放置在功能包中的action文件夹下,格式如下: #定义目标信息 uint32 dishwasher_id #定义结果信息 uint32 total_dishes_cleaned #定义周期反馈的消息 float32 percent_complete可见,一个action的定义需要三部分:goal、result、feedback。 四、代码实现主要实现action的客户端和服务端节点,新建名为action_tutorials功能包。 1、创建客户端在action的定义中,描述了一个洗盘子的任务。客户端节点负责发出action请求,DoDishes_client.cpp文件内容如下: #include #include "action_tutorials/DoDishesAction.h" typedef actionlib::SimpleActionClient Client; // 当action完成后会调用该回调函数一次 void doneCb(const actionlib::SimpleClientGoalState& state, const action_tutorials::DoDishesResultConstPtr& result) { ROS_INFO("Yay! The dishes are now clean"); ros::shutdown(); } // 当action激活后会调用该回调函数一次 void activeCb() { ROS_INFO("Goal just went active"); } // 收到feedback后调用该回调函数 void feedbackCb(const action_tutorials::DoDishesFeedbackConstPtr& feedback) { ROS_INFO(" percent_complete : %f ", feedback->percent_complete); } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_client"); // 定义一个客户端 Client client("do_dishes", true); // 等待服务器端 ROS_INFO("Waiting for action server to start."); client.waitForServer(); ROS_INFO("Action server started, sending goal."); // 创建一个action的goal action_tutorials::DoDishesGoal goal; goal.dishwasher_id = 1; // 发送action的goal给服务器端,并且设置回调函数 client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb); ros::spin(); return 0; } 2、创建服务端服务器节点负责完成洗盘子的任务,并且反馈洗盘子的实时进度,DoDishes_server.cpp文件内容如下: #include #include #include "action_tutorials/DoDishesAction.h" typedef actionlib::SimpleActionServer Server; // 收到action的goal后调用该回调函数 void execute(const action_tutorials::DoDishesGoalConstPtr& goal, Server* as) { ros::Rate r(1); action_tutorials::DoDishesFeedback feedback; ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id); // 假设洗盘子的进度,并且按照1hz的频率发布进度feedback for(int i=1; ipublishFeedback(feedback); r.sleep(); } // 当action完成后,向客户端返回结果 ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id); as->setSucceeded(); } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_server"); ros::NodeHandle n; // 定义一个服务器 Server server(n, "do_dishes", boost::bind(&execute, _1, &server), false); // 服务器开始运行 server.start(); ros::spin(); return 0; } 3、配置在CMakeLists.txt中添加如下规则: find_package(catkin REQUIRED genmsg actionlib_msgs actionlib) add_action_files(DIRECTORY action FILES DoDishes.action) generate_messages(DEPENDENCIES actionlib_msgs)在功能包的package.xml文件中添加如下配置: actionlib actionlib_msgs roscpp actionlib actionlib_msgs roscpp然后编译功能包,如下: 从编译后生成的这些文件看,action确实是一种基于消息的、更加高层的通信机制。 4、运行先启动master节点,命令如下: roscore启动服务端节点,命令如下: rosrun action_tutorials DoDishes_server再启动客户端节点,命令如下: rosrun action_tutorials DoDishes_client效果如下:
打赏 0 点赞 0 收藏 0 分享 微信 微博 QQ 图片 上一篇:ROS学习(20)机器人SLAM功能包——rgbdslam的安装与测试 下一篇:ROS学习(19)机器人SLAM功能包——cartographer |
 Action客户端与Action服务端之间通过actionlib定义的action protocol进行通信,这种协议基于ROS的消息机制实现。客户端向服务端发布任务目标以及在必要的时候取消任务,服务端会向客户端发布当前状态、实时反馈和任务执行的结果。如图:
Action客户端与Action服务端之间通过actionlib定义的action protocol进行通信,这种协议基于ROS的消息机制实现。客户端向服务端发布任务目标以及在必要的时候取消任务,服务端会向客户端发布当前状态、实时反馈和任务执行的结果。如图: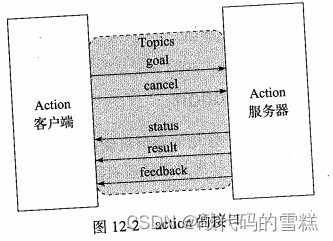
【本文地址】